Programmation testeur de doigt
Déterminer les données utilisées et produites par un programme associé à une fonctionnalité en vue de le modifier.
Programmer un algorithme lié à une nouvelle fonctionnalité.
Modifier et tester le programme associé à une nouvelle fonctionnalité d’un OST
1) Programmation testeur doigt
- Mettre en place la carte Arduino et établissez les connexions filaires.
- Ecrire l'algorithme de programmation (au démarrage du programme le doigt doit être tendu, puis se refermer, 2 fois de suite)
- Dessiner l'algorigramme
- Réaliser le programme et le tester (La carte utilisée ici est une Arduino Uno)
- Ouvrir un nouveau programme Mblock5
- Installer le module Arduino ( voir le Didactitiel Mblock 5)
- Réaliser votre programme en correspondance avec votre Algorigramme
- Implanter votre programme ( aide didactitiel)
- Tester et ajuster la valeur des angles de votre servomoteur pour que le doigt se plie et se tende correctement
- Enregistrer votre programme dans votre drive
- Déposer votre fiche travail et votre programme dans Classroom
| Câblage servo-moteur | Fiche travail /1 | Aide Mblok5 et Arduino |
 |
|
 |
2) Réalisation du programme interface homme/machine
IHM*
Interface Homme Machine
Une IHM permet à l’être humain de suivre sur un terminal, un écran par exemple, le comportement d’un système automatisé
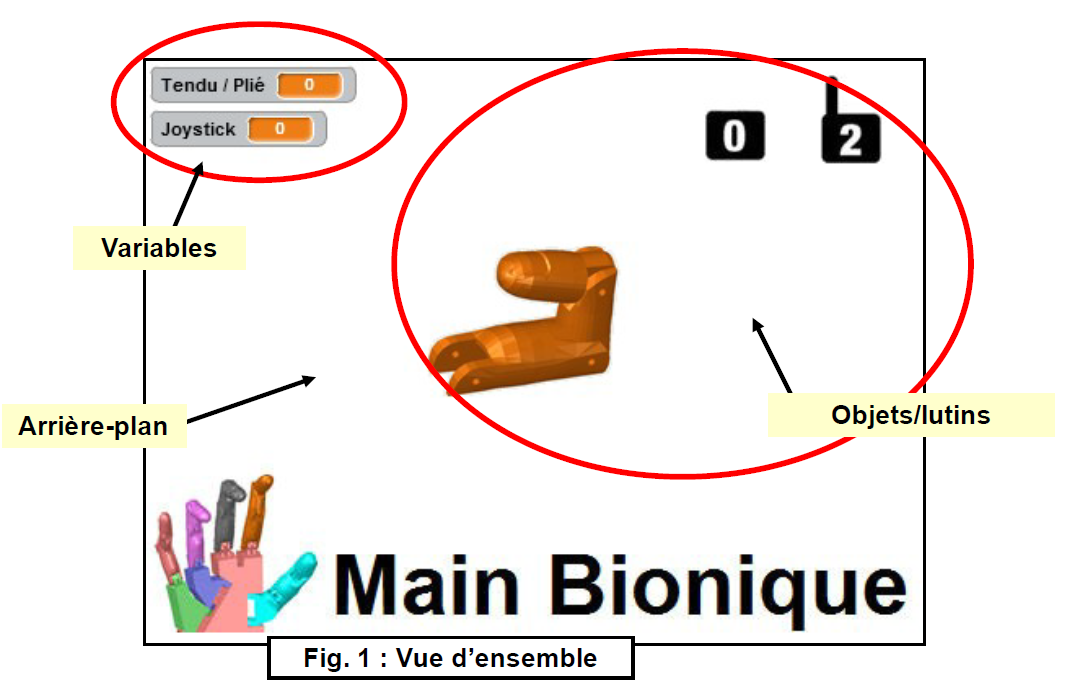
L’IHM que nous souhaitons réaliser doit permettre de visualiser le comportement du doigt (tendu ou plié) en fonction de clics de souris effectués sur l’interface graphique, d’appuis sur les touches du clavier ou d’actions sur le joystick.
L’IHM devra comporter dans sa version de base :
- Un arrière-plan
- Un « objet/lutin » statique Doigt ayant deux « costumes » possibles (tendu ou plié)
- Deux « objets/lutins » statiques à choisir, l’un parmi les 16 positions de la main comportant un index tendu, l’autre parmi les 16 autres positions où l’index est replié.
- Deux variables indiquant l’état du doigt et la valeur renvoyée par le joystick connecté.
- Le programme avec tous les élément se trouve en partie ressource
Pour programmer cette interface, on utilisera le logiciel mBlock. La Figure présente la vue d’ensemble du projet.
Voici les scénarios à réaliser
En mode "direct" (on contrôle la carte en "Live") |
 |
| Scénario 1 Un appui sur la flèche haut du clavier provoque l’apparition du doigt en position tendue sur l’IHM. Un appui sur la flèche bas du clavier provoque l’apparition du doigt en position repliée sur l’IHM. |
 |
| Scénario 2 Un clic sur l’objet représentant l’index tendu provoque l’apparition du doigt en position tendue sur l’IHM. Un clic sur l’objet représentant l’index plié provoque l’apparition du doigt en position repliée sur l’IHM. |
 |
| Scénario 3 La variable Tendu/Plié prend la valeur 1 lorsque le doigt est tendu. Elle reprend la valeur 0 lorsque le doigt est replié. |
 |
|
Scénario 4 Si la valeur est égale à 0, alors le doigt se replie. |
 |
| Scénario 5 La variable Joystick prend la valeur lue sur le joystick connecté. |
 |
| Scénario 6 Lorsque le joystick est au repos alors la variable Tendu/Plié prend la valeur 1 sinon, elle prend la valeur 0 |
 |
|
Scénario 8 |
 |
| Câblage servo-moteur | Fiche travail /2 | Aide Mblok5 et Arduino | Fichier démarrage Mblock pour IHM | |
|
|
|
 |
Dernière modification : 04/01/2024 09:37
Catégorie : -
Page lue 22 fois