Comment faire suivre une ligne à un robot ?
LogistiqueAvec le développement fulgurant du e-commerce, l'industrie de la logistique présente une explosion sans précédent. Pour répondre à la demande croissante, les entreprises de messagerie cherchent à remplacer le travail manuel par des solutions d'automatisation. |
HIKROBOT |
- Utiliser l’algorithmique et la programmation
- Modifier un script et vérifier son exécution
1°) Réponds aux premières questions sur la fiche
2°) Simulation avec le mBot2 - Analyse du comportement : (durée : 15 minutes)
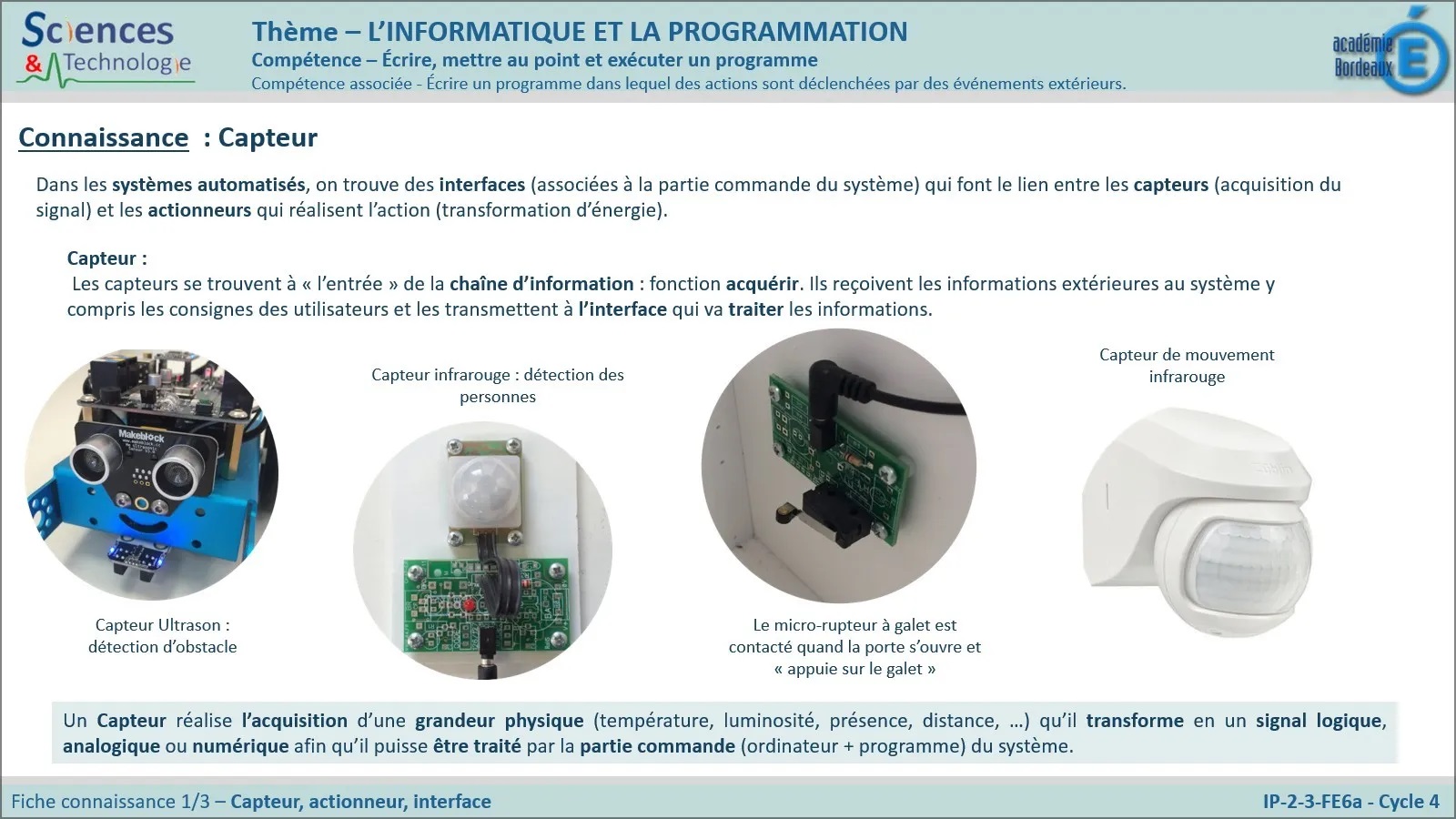
Le module Quad RGB Sensor possède 4 capteurs capables de reconnaitre la couleur du sol. Ainsi le robot est capable de suivre une ligne.
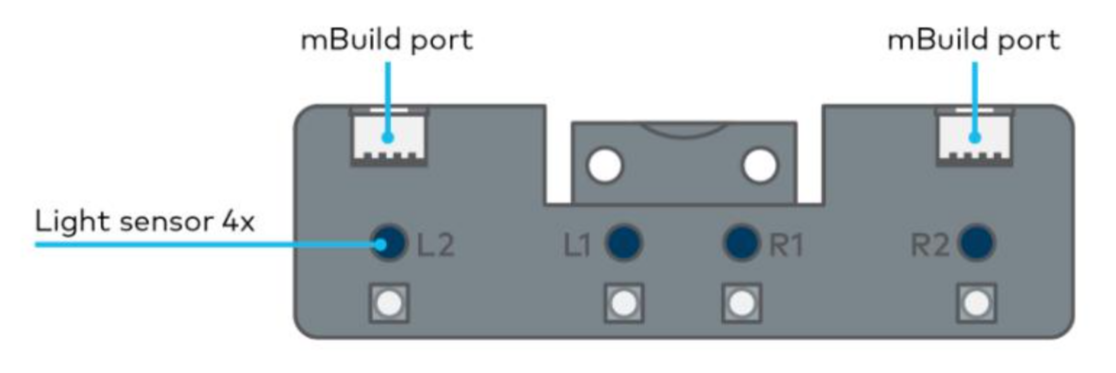
Calibrer le capteur avec le petit bouton (au dessus) :
- Double pression : Positionnez tous les capteurs sur l’arrière-plan (généralement la partie blanche de la piste) et appuyez deux fois sur le bouton. Lorsque les LED clignotent rapidement, bougez rapidement les capteurs de part et d’autre de la ligne (jusqu’à ce que les LED ne clignotent plus). Les nouveaux paramètres sont automatiquement mémorisées. Si les LED clignotent lentement, vous recommencez la calibration. Vous pouvez ensuite vérifier que la ligne est bien détectée en positionnant manuellement le robot ou à coté de la ligne (normalement les LED s’allument ou s’éteignent en fonction de la position de la ligne).

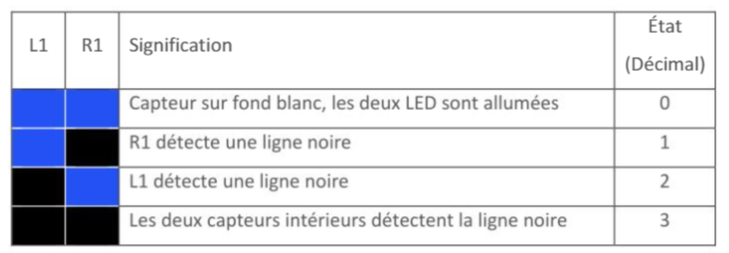
Vous allez utiliser ce bloc de code qui utilise les deux capteurs L1 et R1

Voici un tableau recapitulant les valeurs à mettre en fin de bloc en fonction de ce qui est détecté
A vous de réaliser un programme suiveur de ligne, voici une aide ci-dessous
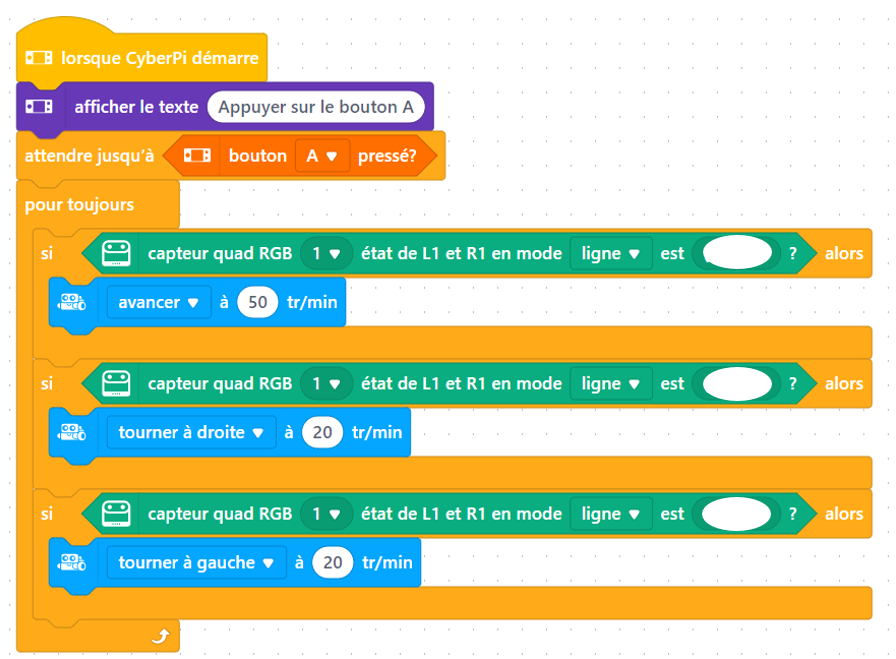
NE PAS OUBLIER D'ENREGISTRER VOTRE PROGRAMME SOUS LE NOM "suiveur de ligne"
Complète la fiche travail
3°) Utilisation des 4 capteurs RGB
Vous allez utiliser ce bloc de code qui utilise les 4 capteurs L1, L2,R1 et R2

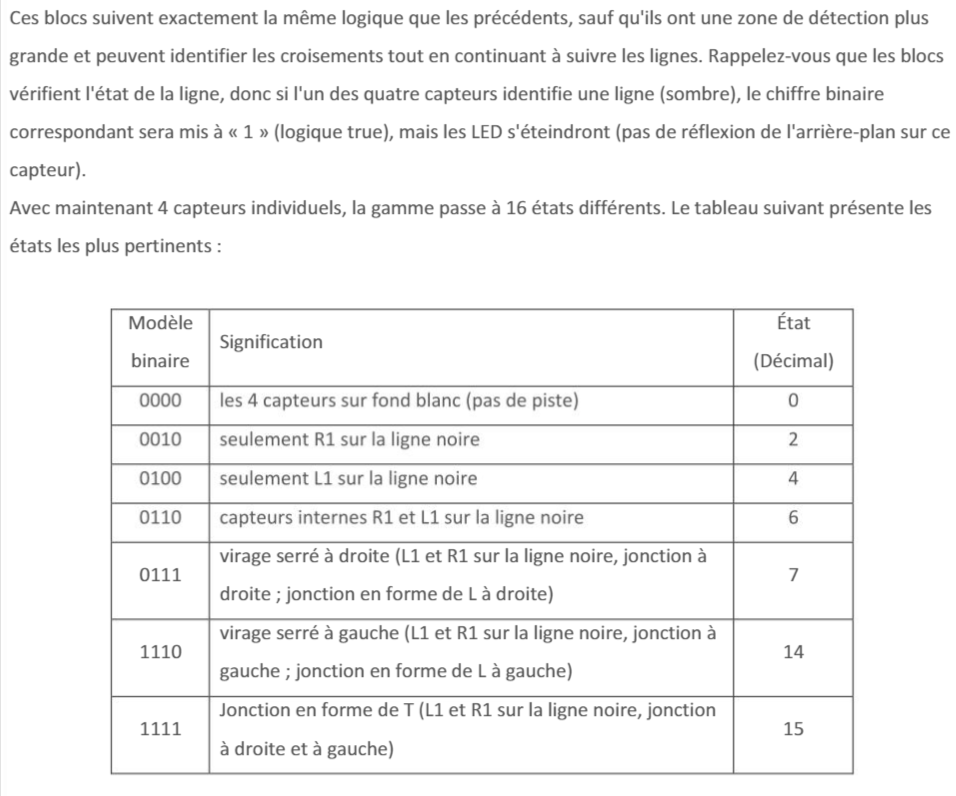
Que doit faire le programme ? :
Le programme doit avancer en suivant la ligne et quand il rencontre une jonction en T il doit s'arrêter.
NE PAS OUBLIER D'ENREGISTRER VOTRE PROGRAMME SOUS LE NOM "Jonction"
Compléter la fiche travail quand votre programme est correct.
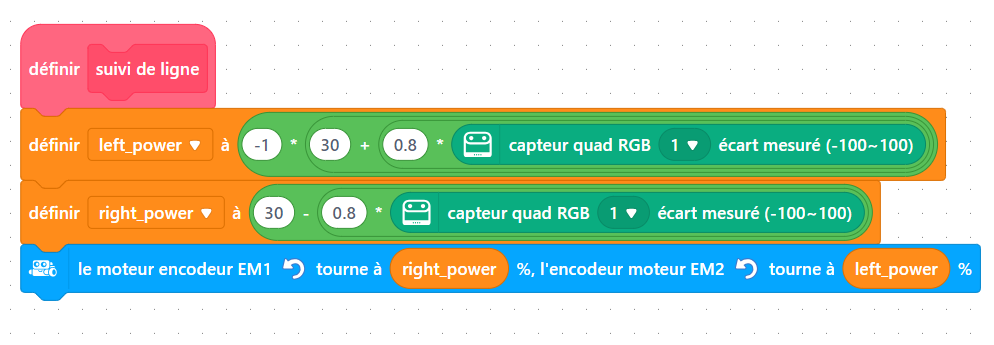
4°) Version avancée du capteurs RGB
Le programme ci-dessous utilise le bloc quad rgb … déviation (-100~100). Il renvoie la valeur 0 lorsque le robot est parfaitement sur la ligne. Mais plus il s’en éloigne et plus la valeur augmente (jusqu’à -100 d’un côté et 100 de l’autre). Ensuite, une astucieuse formule de calcul permet reposition le robot en adaptant la puissance des moteurs à la correction nécessaire. Le programme est très efficace, mais reste un peu compliqué.
Pour ce faire vous avez besoin d’une vitesse de base (30 dans l’exemple). Pour braquer à gauche ou à droite, l’une des roues doit tourner plus vite que l’autre – plus la différence est grande, plus le braquage est important.
Ici le facteur de direction est de 0.8 et envoie également l’écart actuel de la lecture du capteur. Vous pouvez expérimenter un peu les valeurs : si le robot « oscille trop » le facteur de direction est trop élevé ; s’il sort de la trajectoire même dans les courbes faibles, il est trop faible
NE PAS OUBLIER D'ENREGISTRER VOTRE PROGRAMME SOUS LE NOM "Suivi avancée"
Compléter la fiche travail quand votre programme est correct.
| Fiche travail | ||
 |
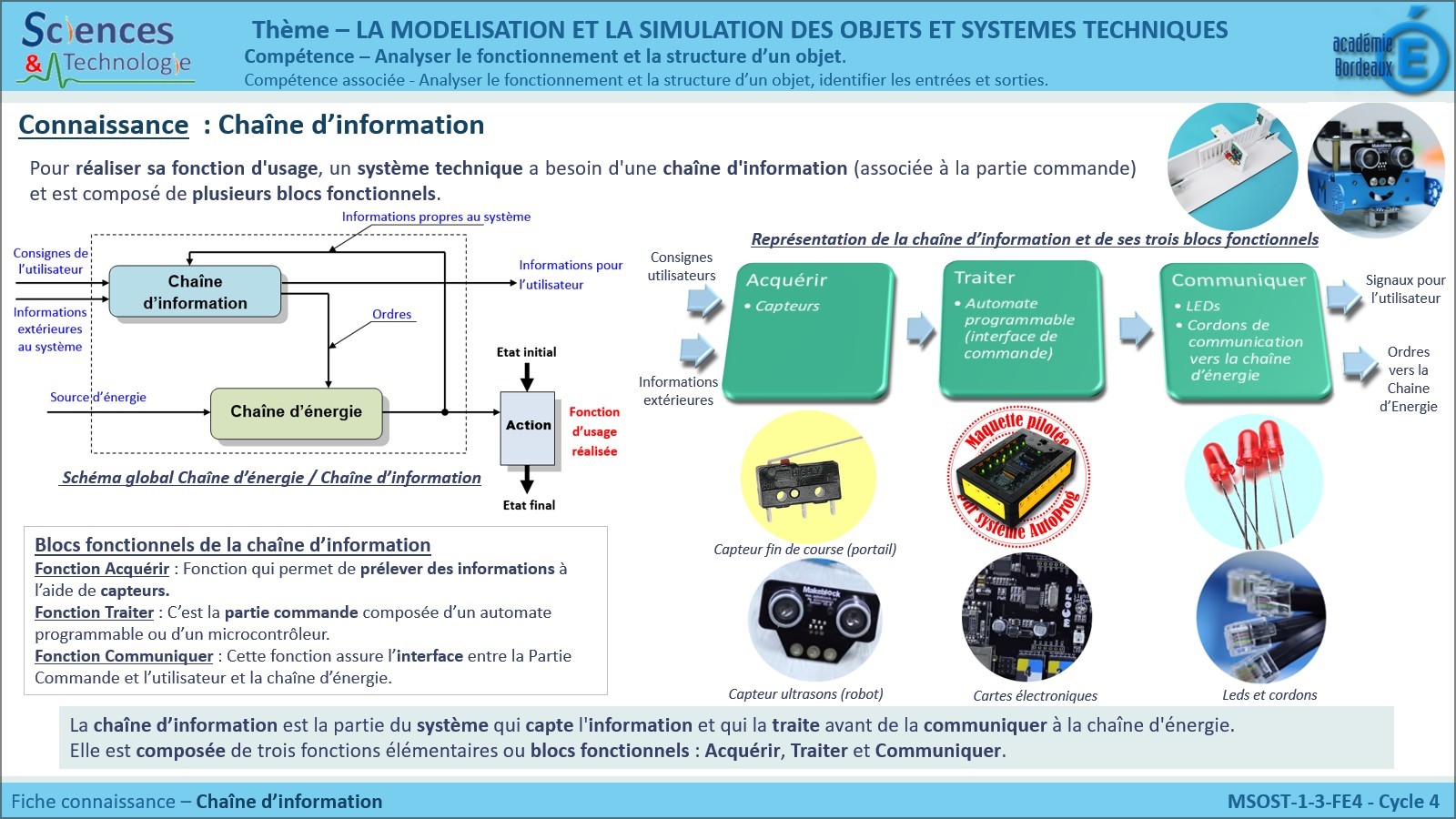
Capteurs Chaine de l'information
Dernière modification : 24/01/2023 14:26
Catégorie : -
Page lue 41 fois